This is PaperWhy. Our sisyphean endeavour not to drown in the immense Machine Learning literature.
With thousands of papers every month, keeping up with and making sense of recent research in machine learning has become almost impossible. By routinely reviewing and reporting papers we help ourselves and hopefully someone else.
tl;dr: this paper introduced an activation function for deep
convolutional networks which specifically benefits from regularization
with dropout1 and still has a universal approximation property for
continuous functions. It is hypothesized that, analogously to ReLUs,
the locally linear character of these units makes the averaging of the
dropout ensemble more accurate than with fully non-linear
units. Although sparsity of representation is lost wrt. ReLUs,
backpropagation of errors is improved by not clamping to 0, resulting
in significant performance gains.
Recall the intuition behind dropout: for each training batch, it masks
out around 50% of the units, thus training a different model / network
of the $2^N$ possible (albeit all having shared parameters), where
$N$ is the total number of units in the network. Consequently it is
benefficial to use higher learning rates in order to make each one
of the models profit as much as possible from the batch it sees. But
then at test time one needs either to sample from the whole ensemble
again by using dropout or to use some averaging trick. We recently2
saw that simply scaling the outputs actually approximates the expected
output of an ensemble of shallow, toy networks, but at the time there
was little rigorous work on the averaging properties of dropout.3
Explicitly designing models to minimize this approximation error may
thus enhance dropout’s performance
Hence the idea of maxout: define a new activation function
\begin{equation} \label{eq:def-maxout} h_i (x) = \underset{j \in
[k]}{\max} z_{i j}, x \in \mathbb{R}^d, i \in [m] \end{equation}
where $z \in \mathbb{R}^{m \times k}$ is a collection of $k$ affine
maps computed as $z_{i j} = x_l W_{l i j} + b_{i j}$ (summation
convention) and $W \in \mathbb{R}^{d \times m \times k}, b \in
\mathbb{R}^{m \times k}$ are to be learned. So
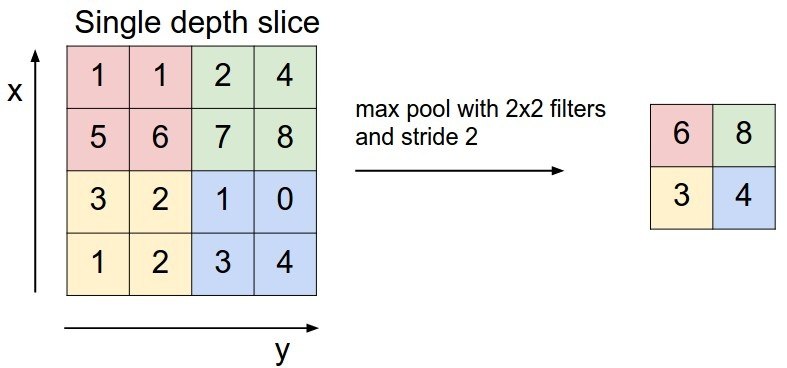
In a convolutional network, a maxout feature map can be constructed
by taking the maximum across $k$ affine feature maps (i.e., pool
across channels, in addition [to] spatial locations).4
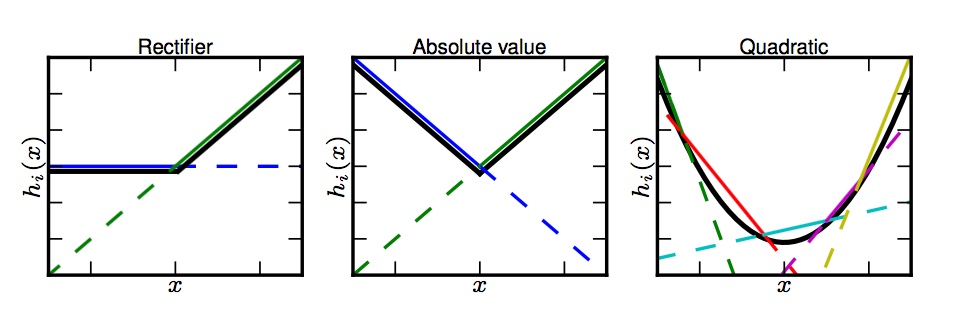
The key observation here with respect to the approximation
properties of maxout networks is the fact that since we are taking the
max over a family of affine functions, the graph of the resulting
function is a convex set, so with maxout units we are producing
piecewise linear (PWL) convex functions:
The dotted lines are the affine filters $z_i$. The epigraph is convex.
Because we have
Theorem: Any continuous PWL function can be expressed as a
difference of two convex PWL functions [of the form (1)].
The proof is given in General constructive representations for continuous piecewise-linear functions,
Wang, S.
(2004)
.
and because PWL functions approximate continuous ones over compact
sets by Stone-Weierstrass, it immediately follows that maxout
networks are universal approximators. Of course we can’t say
anything about rates of convergence, so this statement, though
necessary is not exactly powerful.
It is important to note that because they don’t clamp to 0 like ReLUs
do,
The representation [maxout units produce] is not sparse at all
(…), though the gradient is highly sparse and dropout will
artificially sparsify the effective representation during training.
After extensive cross-validated benchmarking where maxout basically
outperforms everyone (see the paper for the now
not-so-much-state-of-the-art results) at MNIST, CIFAR10, CIFAR100 and
SVHN we come to the question of why it performs so much better than
ReLUs.
The first aspect is the number of parameters required: maxout
performs better with more filters, while ReLUs with more outputs and
the same number of filters ). But since cross-channel pooling
typically reduces the amount of parameters for the next layer
the size of the state and the number of parameters must be about $k$
times higher for rectifiers to obtain generalization performance
approaching that of maxout.
The second aspect is the good interplay with dropout and model
averaging. The fundamental observation now is that
dropout training encourages maxout units to have large linear
regions around inputs that appear in the training data.
The intuitive idea is that these large regions make it relatively rare
that the maximal filter selected changes when the dropout mask does,
and given the conjecture (?) that
dropout does exact model averaging in deeper architectures provided
that they are locally linear among the space of inputs to each layer
that are visited by applying different dropout masks,
it seems plausible that maxout units improve the ability to optimize
when using dropout. However, this is also true of ReLUs and indeed
The only difference between maxout and max pooling over a set of
rectified linear units is that maxout does not include a 0 in the
max.
The experiments in §8.1 show however that this clamping impedes the
optimization process and indicate why maxout units are easier to
optimize than ReLUs. This observation was already done by Deep sparse rectifier neural networks
: dropout induces sparsity (saturation at 0 for
ReLUs) and backprop stops at saturated units, but
Maxout does not suffer from this problem because gradient always
flows through every maxout unit –even when a maxout unit is 0, this
0 is a function of the parameters and may be adjusted.
It is interesting to see how the experiments where designed in order
to single out characteristics of the optimization:
Train a small network on a large dataset. Lack of parameters will
make it hard to fit the training set.
Train a deep and narrow model on MNIST. Vanishing gradients (both
for numerical reasons and because of the clamping to 0 blocking
gradients) will make optimization hard.5
Train two-layer MLPs with 1200 filters per layer and 5-channel
max-pooling: adding a constant 0 deactivates units and degrades
performance over simply taking the max.
A final noteworthy test to keep in mind is keeping track of the
variances of the activations. Maxout networks enjoyed much higher
variance at lower layers than ReLU networks: an indication of the
vanishing gradient problem.