This is PaperWhy. Our sisyphean endeavour not to drown in the immense Machine Learning literature.
With thousands of papers every month, keeping up with and making sense of recent research in machine learning has become almost impossible. By routinely reviewing and reporting papers we help ourselves and hopefully someone else.
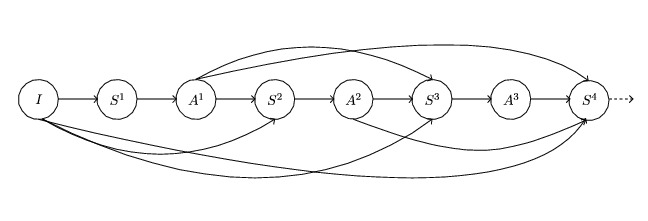
The authors set to study the “averaging” properties of dropout in a
quantitative manner in the context of fully connected, feed forward
networks understood as DAGs. In particular, architectures other than
sequential are included, cf. Figure 1. In the linear case
with no activations, the output of some layer $h$ (no dropout yet) is:
\begin{equation}
O^h_i = A (S_i^h) = A \left( \sum_{l < h} \sum_j
w^{h l}_{i j} O^l_j \right),
\label{dag-network}
\tag{1}
\end{equation}
with $O^0_i = I_i$. The authors consider only sigmoid and
exponential activation functions $A$.
The feed forward network described by (1)
Recall that dropout consists of randomly disabling (i.e. setting to 0)
some fraction of the outputs at each layer.1 This means that for
some fixed input, randomness is introduced in the model by the dropout
scheme. The authors only explicitly consider i.i.d. “Bernoulli gating
variables” $\delta^l_j$ (at layer $l$, output $j$) which disable
outputs with probability $p^l_j$ (but mention that the results extend
to other distributions):
where the NWGM is defined as the quotient $\text{NWGM} (x) = G (x) /
(G (x) - G’ (x))$ where $G (x) = \prod_i x_i^{p_i}$ is the weighted
geometric mean of the $x_i$ with weights $p_i$, and $G’ (x) =
\prod_i (1 - x_i)^{p_i}$ the weighted geometric mean of their
complements.
In (3), $(\ast)$ holds exactly only for sigmoid
and constant functions (p. 2) and $(\triangle)$ follows from
independence. The approximation $(\dagger)$ (Section 4) is shown to be
exact for linear layers and to hold to first order in general. An
interesting observation is that
the
Ky Fan inequality
tells us:
$$ G \leqslant \frac{G}{G + G’} \leqslant E \text{, if } 0 < O_i \leqslant 0.5
\text{ for all } i, $$
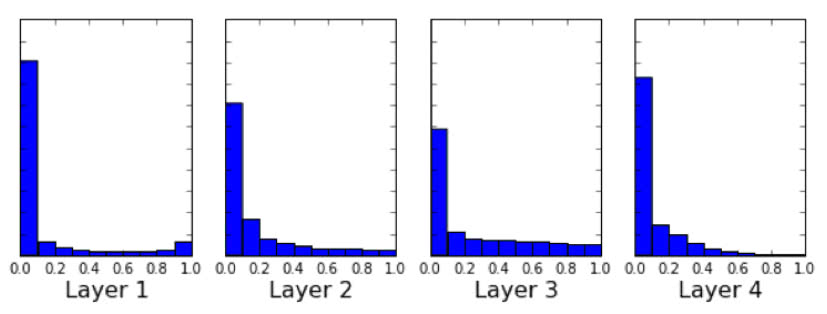
and empirical tests show that:
In every hidden layer of a dropout trained network, the distribution
of neuron activations $O^∗$ is sparse and not symmetric.
Figure 3 in the paper
This seems to indicate that the NWGM is in practice a good
approximation when using sigmoidal units. Note however that the bound
in eq. (22) $| \mathbb{E}- \text{NWGM} | \leqslant 2\mathbb{E} (1
-\mathbb{E}) | 1 - 2\mathbb{E} |$ seems rather rough,
as Figure 3 shows:
The upper bound is quite loose
Analysis of gradient descent: Using dropout means optimizing
simultaneously over the training set and the whole set of possible
networks. Therefore, two quantities of interest are the ensemble
error
So in expectation, the gradient of the dropout network is the
gradient of a regularized ensemble. Observe that:
Dropout provides immediately the magnitude of the regularization
term which is adaptively scaled by the inputs and by the variance of
the dropout variables. Note that $p_i=0.5$ is the value that
provides the highest level of regularization.
Analogously, for a single sigmoid unit: the expected value of the
gradient of the dropout network is approximately the gradient of a
regularized ensemble network:
These results are extended to deeper networks in: The Dropout Learning Algorithm,
Baldi, P.
,
Sadowski, P.
(2014)
Simulations: the validity of the bounds is tested using Monte
Carlo approximations to the ensemble distribution. It is shown in
several examples how dropout favours the sparsity of activations and
“increases the consistency of layers” after dropout layers.